近日,华中科技大学学术委员会主办的“2022年度华中科技大学重大学术进展”评选活动入选成果揭晓。此次产生十项入选成果,我实验室吴志刚教授、丁汉院士的智能软体团队的研究成果“结构可编程、功能可重构软体机器人的设计与制造”成功入选。
软体机器人具有高自由度的类生物响应行为,已经逐渐成为人-机-环境共融生态中的重要载体形式。凭借着柔顺大变形、友好交互等特性,软体机器人在医疗、制造、勘探、人机交互等领域具有很强的应用潜力。但是软材料独有的大变形特性,完全颠覆了原来以硬质材料和小变形为主的设计方法和加工体系。因此在当前软机器人的设计与制造方面存在可编程设计机理尚不明确、大变形条件下异质梯度刚度层界面易失效、有限本体空间内功能集成度和重构性低的缺点(图1)。
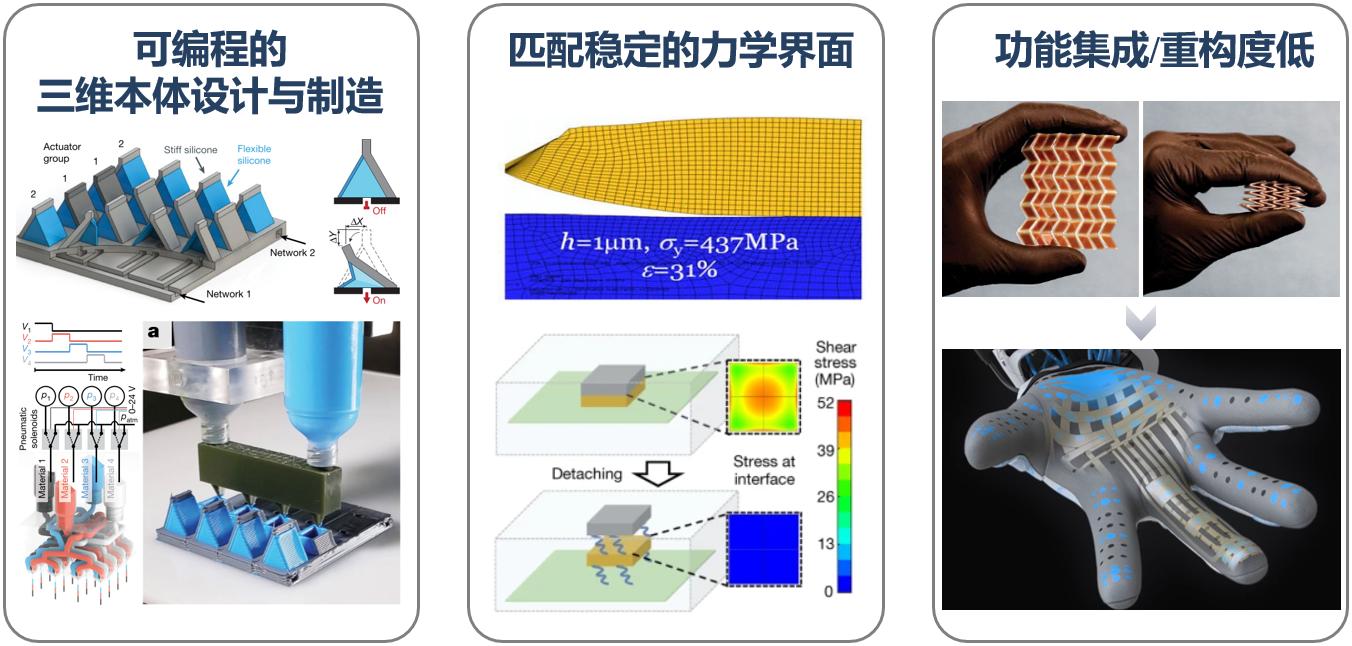
图1 当前软体机器人的设计制造瓶颈
针对此瓶颈,我院智能软体团队,致力于从材料微观物理本质至机械结构宏观可操作层面,做了良好的科学探索与大胆的调控与创新。如图2所示,在软体机器人的结构与功能设计方法层面:1)发现并阐明了表面形貌与溶胀形变的映射规律,提出了三维空间形状编程的设计准则;2)建立了“结构刚度-曲率变化” 的变形理论,发展了复杂三维曲面共形贴附设计方法;3)深入研究了人手多刚度协同机构,提出了刚-柔-软耦合驱动的高承载软抓手设计方法。在学术成果与应用探索方面,发表了我校首篇机器人领域的顶刊《Science Robotics》;在科技部重点研发计划支持下,开发了刚柔变形的肿瘤消融手术器械,目前已累计完成140例动物手术。
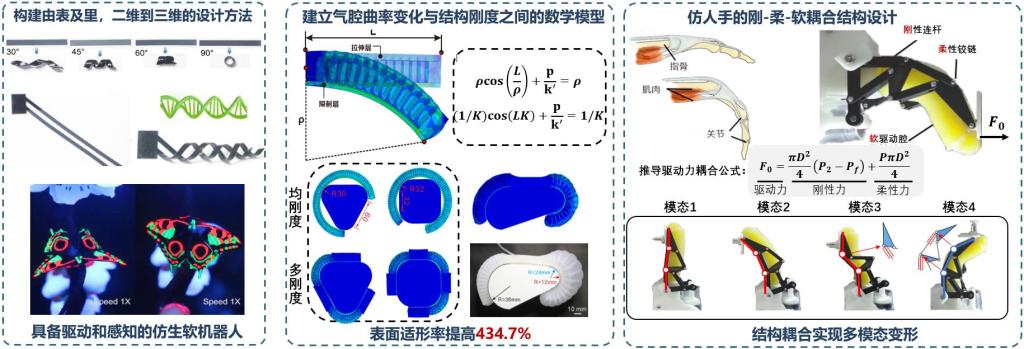
图2 软体机器人的结构与功能设计方法
在软体机器人的结构与功能制造工艺层面:1)研发了激光调节表面黏附性的工艺,并实现了并行大通量、三维异质集成制造工艺;2)开发基于卷对卷加工的高通量软磁片制造工艺,实现折纸多功能机器人的批量制造(图3)。并基于这些工艺,开发了手指康复软体机器人、叶片表面裂纹检测的机器人和相关制造装备。
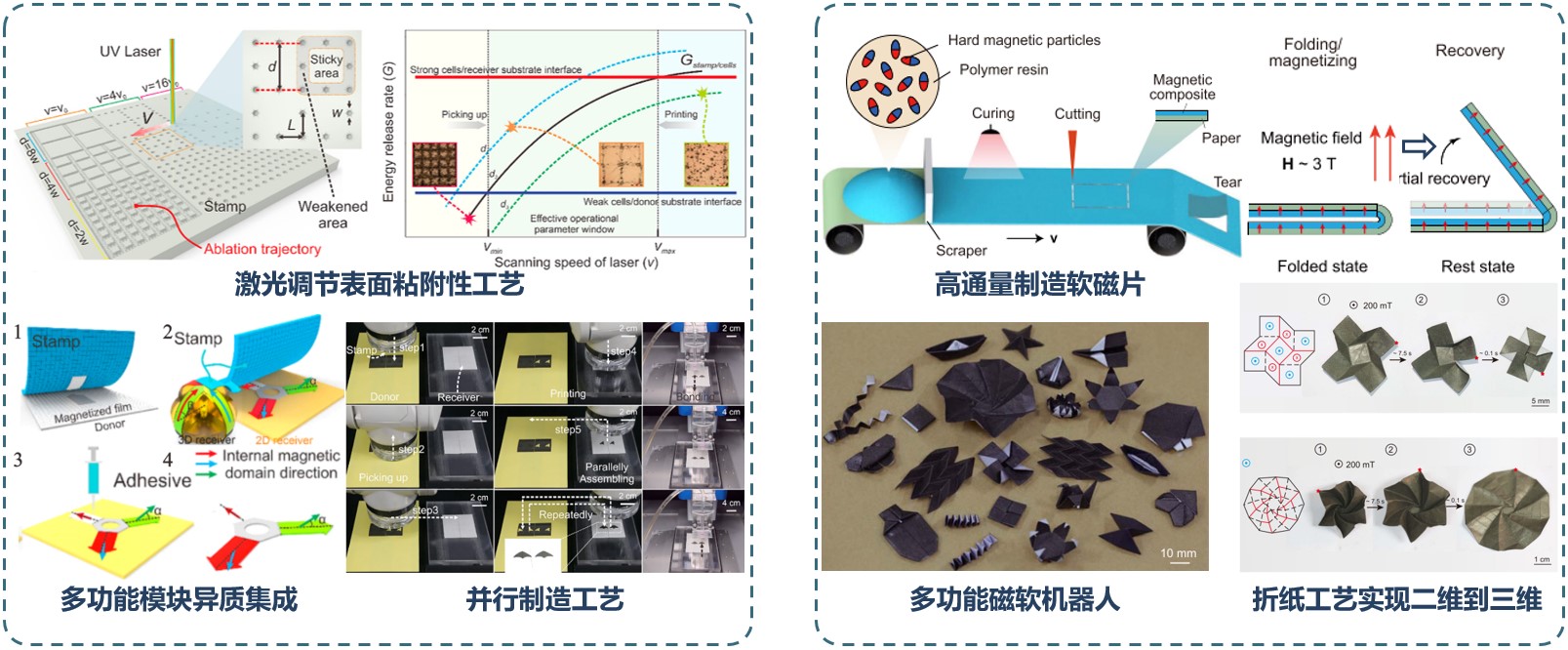
图3 软体机器人的结构与功能制造方法
相关链接:https://mp.weixin.qq.com/s/k3mppXrRQlLgImOtsrtByg
课题组网址:www.softintel.top
 微信公众号
微信公众号