6月14日下午,由我校党委研工部主办,我室承办的“第二届华中科技大学研究生机器人创新设计大赛”决赛顺利举行。经过线上答辩及专家评审,我室共4支参赛团队斩获佳绩,并包揽比赛前三名,其中iRobotCNC团队获得一等奖,“力拔千钧”团队、“TUFBOT”团队获得二等奖,“奔腾后浪”团队获得三等奖。

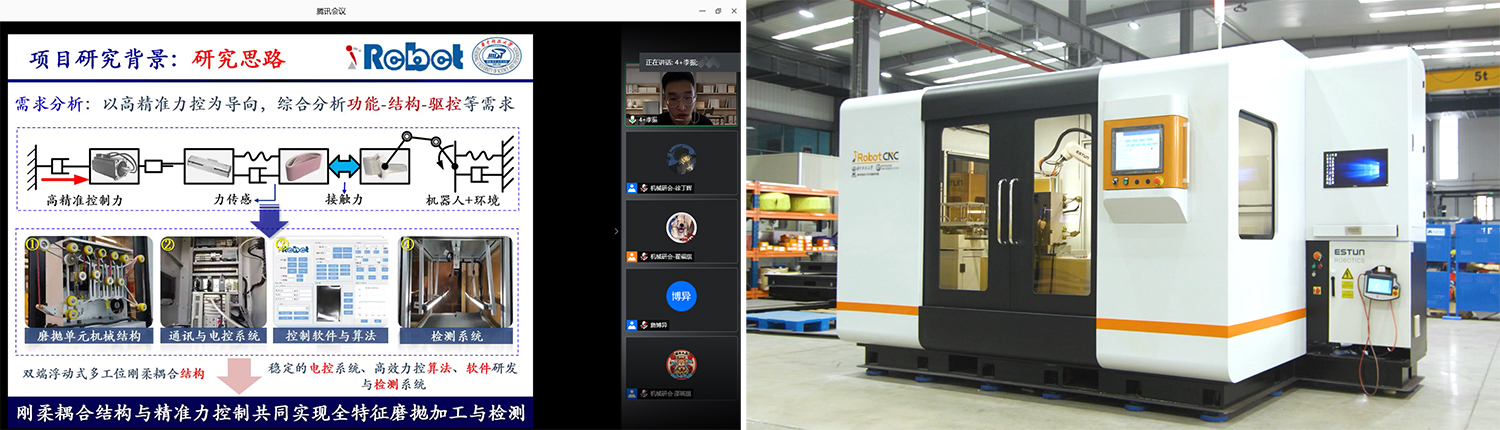
iRobotCNC团队的参赛作品是“航空发动机叶片全数字式机器人磨抛系统”,由赵欢老师指导参赛。该项目面向机器人磨抛系统的高带宽精准力控制难题展开研究,以力位解耦为出发点,开发了刚柔耦合的全数字式力控砂带磨抛单元,研究了接触过渡态与稳态力控算法,编写了交互控制软件与叶片加工工艺方案。实现机器人砂带磨抛系统的力位解耦控制,以相互配合完成航发叶片的力位协同精准磨抛具有重大意义。
“力拔千钧”团队的参赛作品是“一种欠驱动刚柔耦合双驱气动抓手”,由吴志刚老师指导参赛。该作品巧妙的将刚性机构与软体手指结合,实现了大范围内抓取性能的平稳过渡,还设计了相应的新型电容传感器,赋予其感知力大小与分布的能力。该作品在生物样本采集、工业分拣以及人机交互等领域均有着广泛的应用前景。
“TUFBOT”团队的参赛作品是“运载操作一体化自主移动机器人”,由王书亭老师、谢远龙老师指导参赛。该作品研究了动态环境下场景快速建图、高精度定位、动态路径规划等移动机器人共性技术,以及大载荷机器人结构动态稳定性、四轮独立驱动控制、运载操作一体化等关键技术,研制出高速高精运载操作一体化自主移动机器人,在智能制造、无人车间领域有广阔的应用前景。

“奔腾后浪”团队的参赛作品是“一种基于变胞原理的欠驱动自适应机械手”,由张海鸥老师指导参赛。该作品设计了一种具有形状自适应抓取能力的机械手,该机械手手指机构按照各关节接触力尽量均匀分布的设计要求,采用遗传算法,对手指进行结构参数优化。该作品可以提高机器人的作业范围和作业能力,特别适合航天、深海作业,具有很高的实用价值。
本次大赛共有来自多个学院的18支队伍报名参赛,经过初赛评审、项目汇报与展示、专家问答等环节,共产生一等奖1项,二等奖3项、三等奖5项。参赛作品构思新颖,创意独特,成绩优秀的队伍将代表学校参加即将举办的“第二届中国研究生机器人创新大赛”。
此次华中科技大学第二届研究生机器人创新设计大赛是面向全校在读研究生的一项团体性机器人设计创意实践活动。大赛旨在成为研究生展示集成机器人设计能力的舞台、进行良好的创新实践训练的平台,提升研究生创新创业意识,培养研究生设计能力,推动机器人科技创新发展,为参赛学生提供知识交流和实践探索的宝贵机会。
 微信公众号
微信公众号