5月12日,智能制造与装备全国重点实验室黄永安教授与澳门大学钟俊文助理教授合作,在《eScience》期刊(IF=42.9)上发表题为“Bio-inspired and programmable Marangoni motor for highly maneuverable and adaptable S-aquabots(可编程Marangoni马达驱动的高可控小型水面机器人)”的最新研究论文。

小型机器人自主作业需具备可控机动性、环境适应性和智能感知能力,以应对复杂环境。但厘米级及以下机器人受能源与载荷限制,功能模块集成困难。近年来陆地小型机器人因技术发展进步显著,而水面多功能小型机器人研发滞后,其在环境监测等领域意义重大。目前,水面机器人驱动方式多样,如压电、磁场等,但多依赖外部供电或集成度低,制约环境适应性。自然界甲虫借Marangoni效应实现快速水面移动,为机器人研发提供思路,该效应扰动小、效率高,适合开发环保型机器人。基于Marangoni效应的机器人虽有进展,但存在运动控制精度不足、依赖外部设备,且传统刚性模块限制负载和设计灵活性的问题,然而柔性电子技术为解决难题带来希望。本研究展示了一种叶片状机水面器人,利用可编程Marangoni马达精准控乙醇释放,燃油效率提高3.5倍。它能在7%盐度或10-50℃环境作业,1.2mL的燃料可支持机器人持续工作226s,完成复杂指令,采用柔性混合电子实现智能感知与无线通信,仿生外形隐蔽性强、噪音低至40dB。这些突破不仅解决了传统水面机器人续航短、功能单一的痛点,还通过模块化设计,使机器人可根据任务需求搭载水质检测、微型无线摄像头等设备,拓展了在生态监测、应急救援等场景的应用潜力,为新一代智能水上机器人的实际应用奠定基础。
图1a展示了一种枫叶形状的仿生无线水上机器人的设计。其核心结构包含四层:柔性电子层(含传感器和控制系统)、电磁线圈层、仿叶脉燃料舱(3D打印PP框架储存乙醇)和底部的磁铁。通电时,线圈产生的洛伦兹力挤压柔性燃料舱,使乙醇从通道定向释放(图1b)。乙醇扩散降低水面张力,形成马兰戈尼流推动机器人前进。通过独立控制三个线圈,可实现前进、转向和制动(图1c)。该机器人能精准完成复杂轨迹,如42 s内完成210 cm的"UM"路径(图1d)。该机器人具有高度隐蔽性,枫叶、五边形等仿生外形的机器人经过涂装后能隐藏在自然环境中(图1e)。其驱动系统(PM-motor)无传统马达,噪声仅40分贝,远低于其他小型水面机器人(图1f)。

图1.(a)机器人的基本结构示意图;(b)机器人的驱动原理;(c)乙醇燃料的释放过程;(d)运动控制演示;
(e)机器人经涂装后隐藏在树叶堆中;(f)与其他机器人工作噪音对比。
将微型无线摄像头与枫叶形无线版本机器人集成,测试其在户外环境中的实时监测能力(图2a)。该机器人在流动水面上成功完成前进、转向等动作,60s内移动约130cm(图2b)。搭载的摄像头可实时传输周边环境影像至手机。无线通信距离超过50m,响应时间小于0.3毫秒(图2c)。为测试长期环境监测功能,我们在机器人中集成低功耗光强、温湿度传感器(图2d)。在户外水池的8小时连续测试中,设备每10分钟回传数据,结果与当日气象报告一致(图2e,2f)。该机器人可自然融入环境,适合长期监测任务,展现了其在户外水面环境监测中的应用潜力。
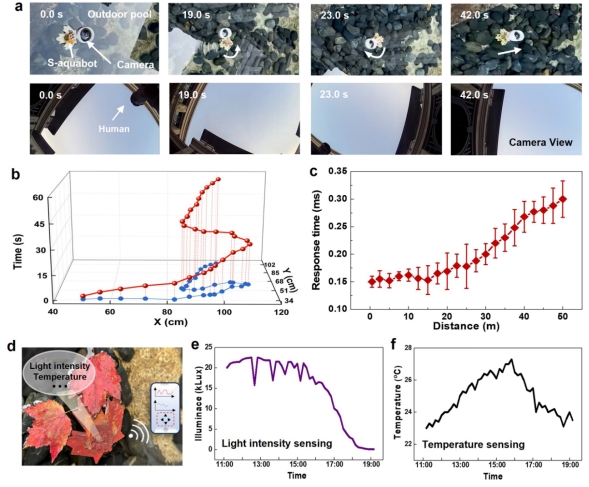
图2.(a)搭载摄像头的机器人户外应用;(b)户外运动的实时轨迹;(c)无线通讯距离和反应时间;
(d)机器人隐藏在水面中的实物图;(e)检测到的光强和(f)温度数据。
第一作者是澳门大学机电工程系周冶锡,黄永安教授、钟俊文助理教授为共同通信作者。本研究得到了澳门科学技术发展基金(0117/2024/AMJ)和国家自然科学基金(51925503, 52188102)资助。
论文链接:
https://www.sciencedirect.com/science/article/pii/S2667141724001344
 微信公众号
微信公众号