机器人领域顶级期刊IEEE Trans. Robotics在线刊登了我室李文龙教授和丁汉院士团队机器人加工方面的最新研究成果“Trajectory planning and optimization for robotic machining based on measured point cloud(基于测量点云的机器人加工轨迹生成与优化)”。我室博士研究生王刚为第一作者,李文龙教授为通讯作者,丁汉院士和赵欢教授为共同作者。这是该团队继2020年后第二次在期刊IEEE Trans. Robotics发表机器人加工方面的研究成果。
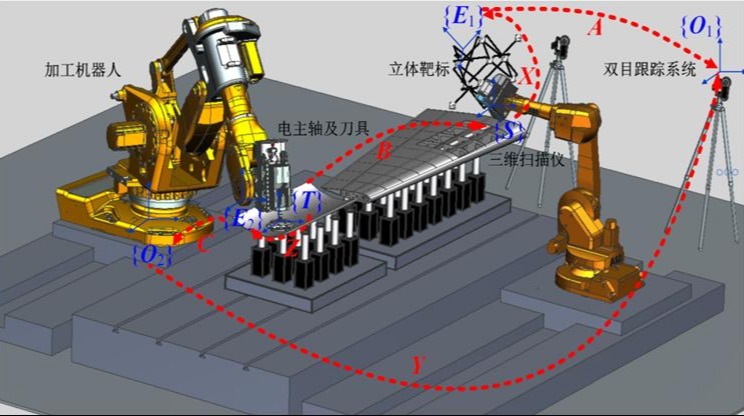
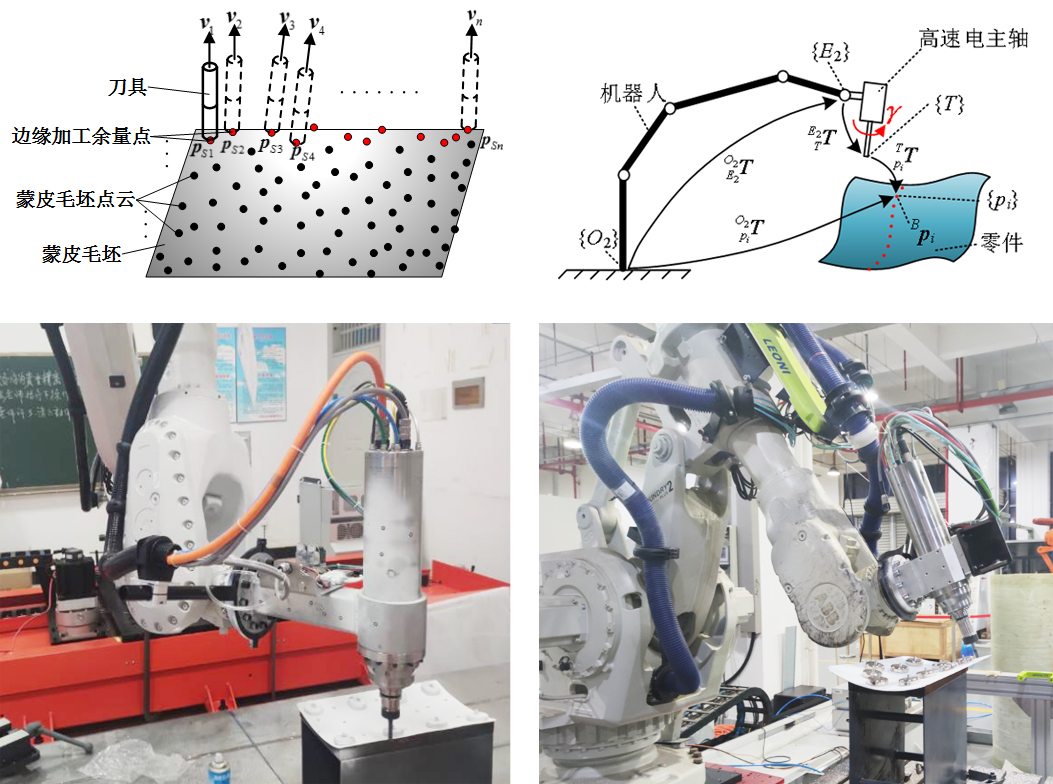
以蒙皮为代表的航空薄壁件具有外形复杂(自由曲面)、结构尺寸大(机身蒙皮达10 m)、薄壁弱刚性(厚度仅2 mm)等特点,目前制造企业普遍采用肉眼定位/手工切边方式去除蒙皮毛坯边缘加工余量,存在人因误差大、边缘轮廓加工精度低、装配后对缝间隙难控等问题。三维视觉引导的机器人加工具有视觉定位精准、大范围操作灵活、可多机协同作业等技术优势,为解决大型复杂构件大范围小余量高效加工提供了新思路。然而蒙皮薄壁弱刚性特点决定其装配时易发生弯曲变形,导致无法基于设计模型进行加工规划。为此本文以现场实际测量的工件曲面点云为输入,研究基于双NURBS曲线最小二乘拟合的初始刀具轨迹生成方法,建立刀具轨迹光顺优化-偏差控制同步操作目标函数,突破了离散测点生成刀具路径点与刀轴矢量存在的抖动问题;建立机器人刚度/灵巧度同步优化目标函数,并采用智能算法求解所有路径点的最优机器人姿态,最终生成了满足光顺性、刚度与灵巧度要求的机器人加工路径。上述工作拓展了三维视觉测量与机器人加工基础理论,为研制“能工巧匠”的机器人智能加工装备,实现制造母机与制造模式的根本性变革提供了重要支撑。
该工作得到国家自然科学基金基础科学中心项目“机器人化智能制造”(No.52188102)和国家自然科学基金重大项目“大型构件机器人小余量去除机理与高精度装配”(No.52090054)的联合资助,是丁汉院士负责的国家自然科学基金委“共融机器人基础理论与关键技术研究”重大研究计划的重要组成部分,一直以来受到丁汉院士和陶波教授领衔的专家组的大力指导。
论文链接:https://ieeexplore.ieee.org/document/9642395
 微信公众号
微信公众号